上证报中国证券网讯(记者孙小程)“今年来看,WAIC上机器人的数量多了,而且状态也好了很多,走路技术在今年已经被彻底攻克了,大家更多是聚焦在机器人的干活能力上。”在2025世界人工智能大会(WAIC2025)现场,开普勒人形机器人CEO胡德波向上证报记者分享了他的观展感受。
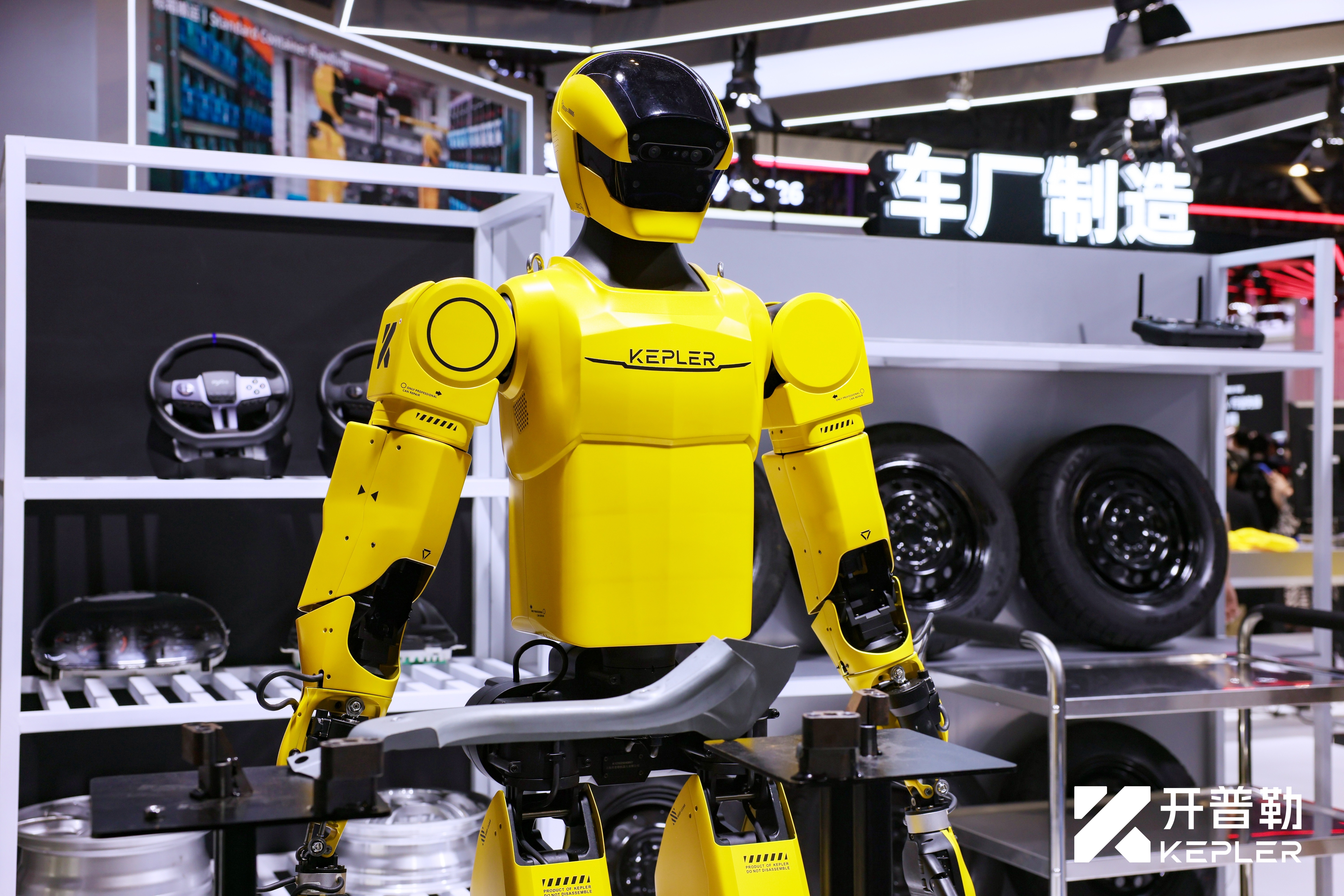
本次WAIC上,开普勒展台以“场景化体验”为设计核心,围绕车厂制造、物流搬运、物流分拣、科研数采四大应用区进行布局。展区覆盖从成熟商用方案到开源二次开发支持的完整技术链,全面展示具身智能机器人在各行业的实际应用能力。开普勒还在展区发起了“充电1小时,连干8小时”的全球首次人形机器人8小时续航直播挑战。
胡德波介绍,开普勒专注于开发面向工业场景的“蓝领机器人”,主要应用于工厂和仓储环境。这些场景的工作内容可以大致划分为两大类,一是搬运类任务,比如仓库中的物料转运,对精度和节拍要求相对较低,是较易实现自动化落地的领域;二是操作类任务,更为复杂多样,包括汽车制造中的上下料等工序,这类任务需要根据具体工艺难度进行分级实施。
目前,像汽车工厂的上下料操作,以及仓储物流中的搬运作业,都是开普勒优先推进的可行性较高的应用场景。随着技术迭代,开普勒的机器人将逐步拓展到更复杂的工业操作领域。
去年以来,多家企业的机器人进入汽车、3C工厂展开实训。对此,胡德波认为,当前阶段,机器人进入工厂实训是必经的发展路径。就像新工人需要上岗培训一样,机器人也需要在实际生产环境中进行训练和适应,暂时不能直接“上岗”。
对于开普勒而言,今年将聚焦POC(概念验证)阶段,重点进行核心功能测试和技术验证;2026年将进入小批量商用阶段,在已验证的场景中实现产品落地。
要推进人形机器人的大规模铺开,胡德波认为,关键在于本体与小脑(运动控制系统)的协同稳定性,这是一个需要软硬件全栈优化的系统工程。此外,机器人要真正“干活”,还有几个门槛需要迈过:系统稳定性、节拍、安全性,以及投资回报比。
在WAIC上,开普勒重点展示了机器人在上下料、搬运、分拣等场景的应用。从现场来看,这些基础功能均已达到可运行状态。胡德波称,下一阶段,将着重优化整体作业流程的流畅度、稳定性和节拍的控制精度。